OrientationRegion#
- class orix.quaternion.OrientationRegion(data: Union[ndarray, Rotation, list, tuple])[source]#
Bases:
RotationA set of
Rotationwhich are the normals of an orientation region.Notes
An orientation region is some subset of the complete space of orientations.
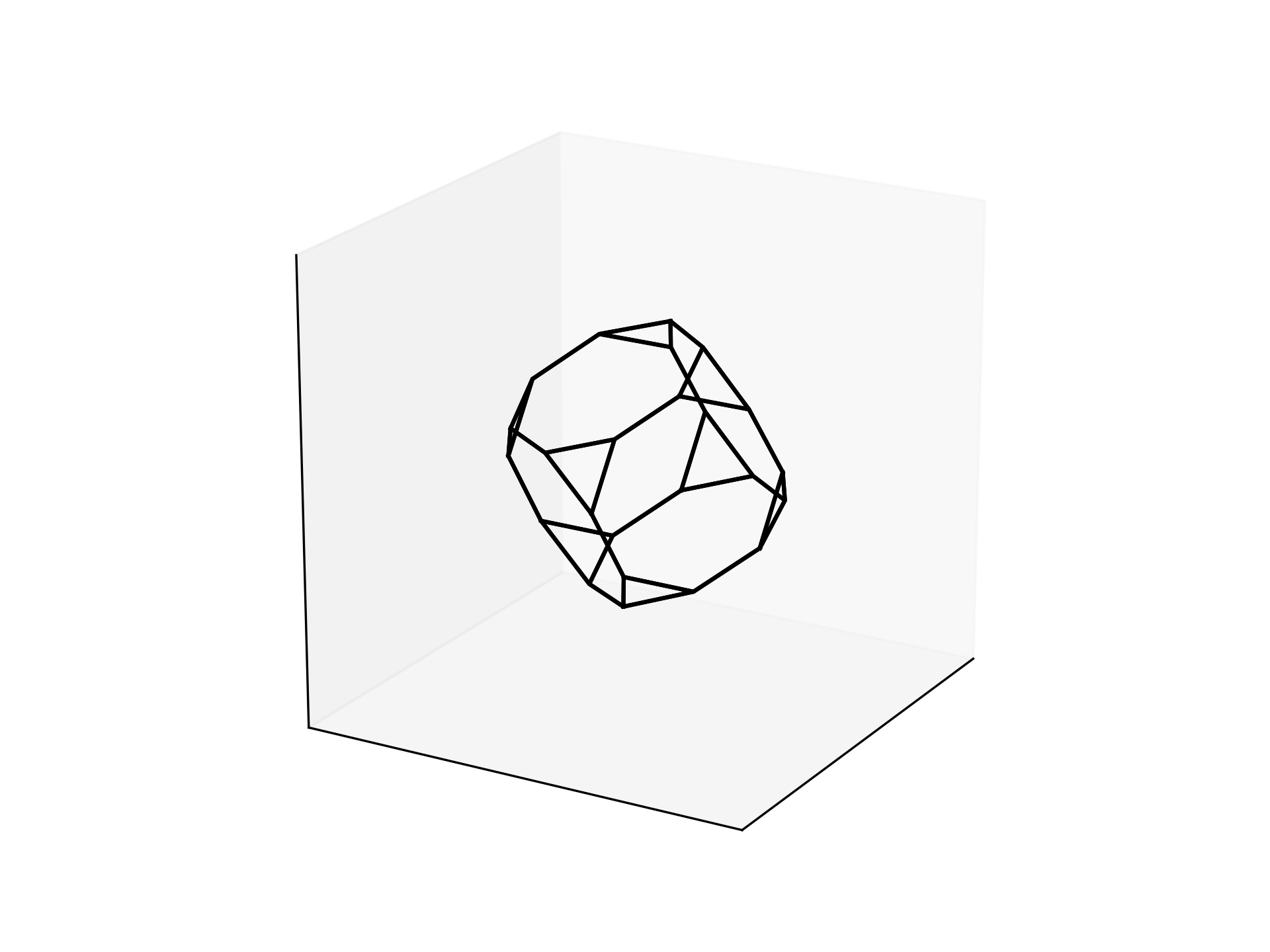
The complete orientation space represents every possible orientation of an object. The whole space is not always needed, for example if the orientation of an object is constrained or (most commonly) if the object is symmetrical. In this case, the space can be segmented using sets of Rotations representing boundaries in the space. This is clearest in the Rodrigues parametrisation, where the boundaries are planes, such as the example here: the asymmetric domain of an adjusted 432 symmetry.
Rotations or orientations can be inside or outside of an orientation region.
Attributes
Methods
Return the faces of the orientation region.
OrientationRegion.from_symmetry(s1[, s2])Return the set of unique (mis)orientations of a symmetrical object.
Return suitable rotations for the construction of a wireframe delineating the borders of the region.
Return the vertices of the orientation region.